この記事の3行まとめ
- COYOTE 3DCG STUDIO、「Havok Cloth」における衣服の貫通・動きの破綻を改善する設定方法を解説した記事を公開
- ワトソン・アメリア氏の3Dモデルをもとに「Havok Cloth」の使い方を解説する連載記事の7回目
- Epic Gamesが提供するRBFシステム「Pose Driver Connect」を活用した補正・制御について解説している
クリーク・アンド・リバー社の3DCG制作チーム「COYOTE 3DCG STUDIO」は、クロスシミュレーションツール「Havok Cloth」の使用方法を解説するブログ記事を連載しています。
2025年7月1日(火)には、7回目となる『補助骨編「応用」』と題した記事が公開。複雑なポーズを取る際に腕が衣服にめり込むなどの不具合を防止するセットアップ手法を解説しています。
【ブログ更新📝】
いよいよ今回から応用編スタート!
【Havok Cloth ✕ RBF】のワークフローをご紹介します!
クロス破綻や突き抜けをRBFでどう補正するのか?
補助骨の設計方針など、 実践的な応用例をまとめています!
▶https://t.co/01UKQ5cNfW#HavokCloth #Havok #Maya #TA pic.twitter.com/WlwHcCdMnC
— COYOTE 3DCG STUDIO -テクニカルアーティストチーム- (@cr_coyote) July 1, 2025
【ブログ更新📝】
いよいよ今回から応用編スタート!
【Havok Cloth ✕ RBF】のワークフローをご紹介します!
クロス破綻や突き抜けをRBFでどう補正するのか?
補助骨の設計方針など、 実践的な応用例をまとめています!
▶https://t.co/01UKQ5cNfW#HavokCloth #Havok #Maya #TA pic.twitter.com/WlwHcCdMnC
— COYOTE 3DCG STUDIO -テクニカルアーティストチーム- (@cr_coyote) July 1, 2025
「Havok Cloth」は、Havokが提供する衣服の表現に特化した物理シミュレーション用ミドルウェア。
連載記事ではHavok Clothの使用方法について、ホロライブプロダクション所属タレント ワトソン・アメリア氏の公式MMDモデルをもとに解説しています。
このたび公開された『補助骨編「応用」』では、スキンウェイトの調整だけでは対処できない激しいモーション時の衣服の貫通・破綻を防ぐ方法を解説。
大本となるスキンメッシュの動きに依存して挙動を計算するHavok Clothのシミュレーション方法では防ぎきれない不具合を解決するため、Epic Gamesが提供する公式のRBF(※)システム「Pose Driver Connect」を活用した補正・制御補間について取り上げています。
※ 「Radial Basis Function」の略。特定の点との距離に従い値が決定する関数

本来であれば画像の青線で記載されている箇所のように重力で衣服が下に垂れる挙動が望ましいが、激しい動きを行う場合、赤線で示したように破綻が生じる恐れがある(画像はブログ記事より引用)
まず左右の腕に対して、腕の回転を打ち消す「ArmTC」や肩付近の貫通を防ぐ「ShoulderCloth」など約10本のジョイントを作成。
その後、腕のボーンからウェイトをジョイントに移してメッシュにバインドしたのち、「Pose Driver Connect」に付属するツール「PoseWrangler」を用いてRBFによる制御の設定を行い、衣服の挙動における破綻を修正するフローなどを解説しています。
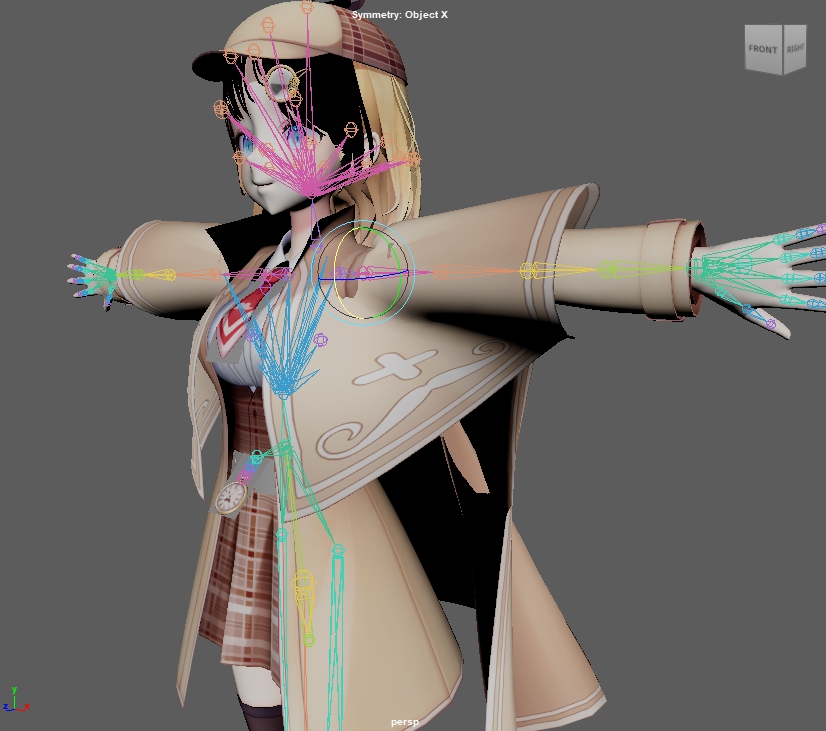
RBFで制御を行う前の様子。手の甲を前に向ける角度で腕を捻ったとき、ケープが腕に巻き込まれるようにして捻じれていることがわかる(画像はブログ記事より引用)
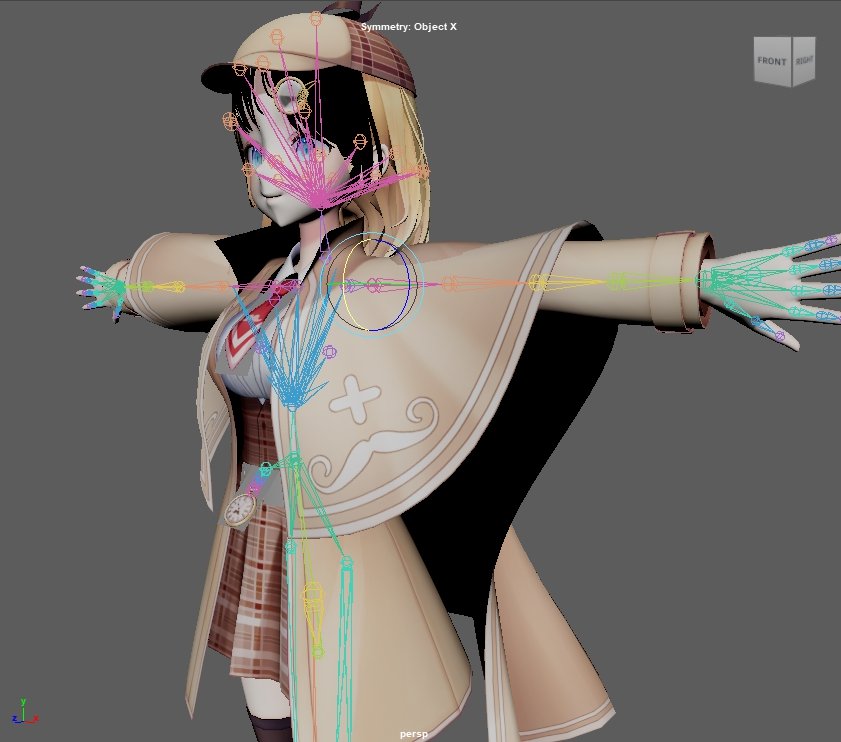
制御実施後の挙動を示した画像。ケープが腕の動きに引きずられず正常なシミュレーションを維持している(画像はブログ記事より引用)
次回に公開されるのは「Havok Cloth設定編」。この記事が本連載における最終回となることが告知されています。
詳細はブログ記事をご確認ください。
【Havok Cloth】補助骨編「応用」 | TECH-COYOTE